

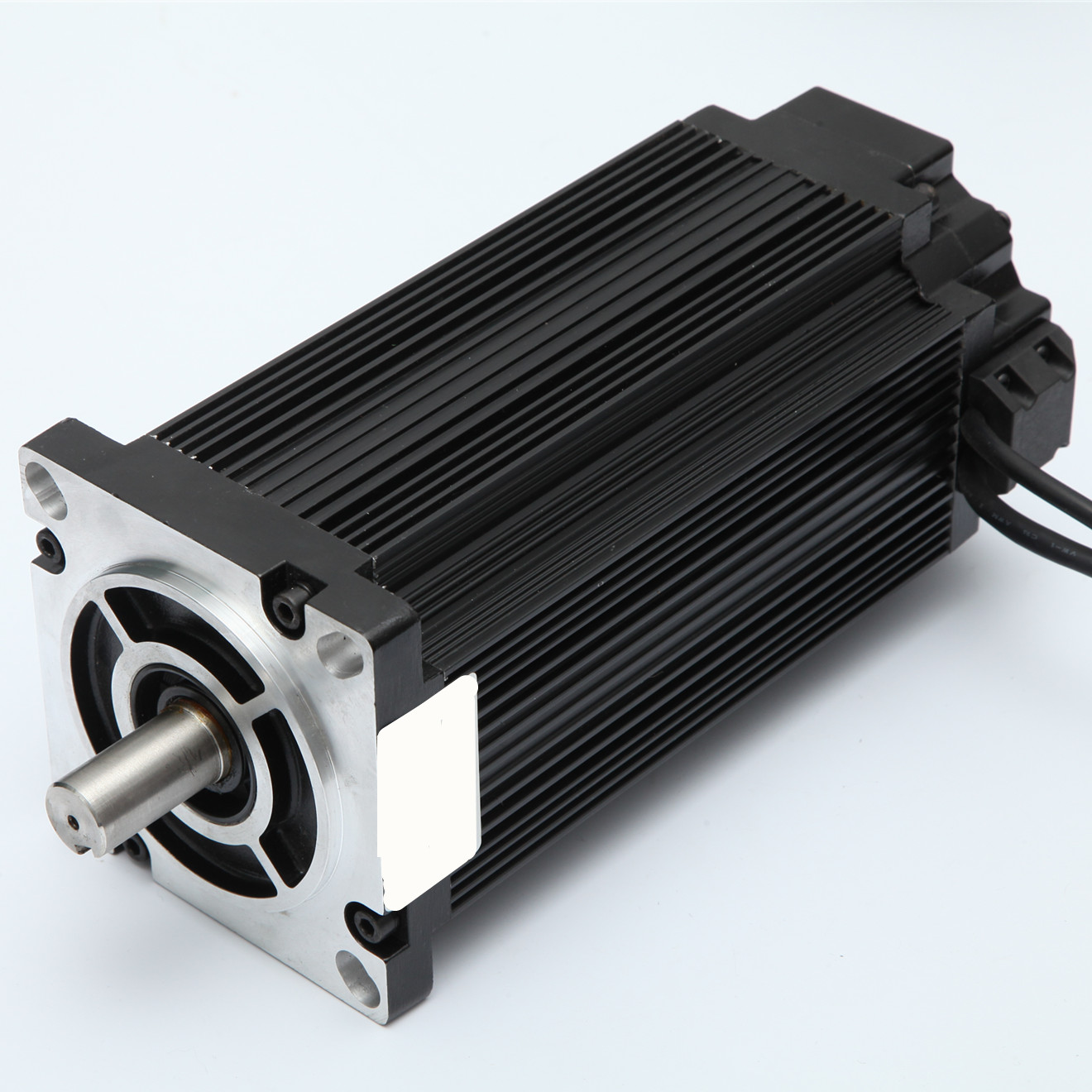
उच्च व्होल्टेज डिजिटल डिस्प्ले 220V Nema42 बंद लूप 12Nm स्टेपर मोटर
NEMA42 इझी सर्वो मालिका(NEMA42 बंद लूप मालिका)
मोटर इलेक्ट्रिकल पॅरामीटर्स:
| मोड | पायरी कोन | वर्तमान (A) | प्रतिकार (Ω±10%) | अधिष्ठाता (mH±20%) | होल्डिंग टॉर्क (Nm) | मोटर लांबी (मिमी) | एन्कोडर ठराव (पीपीआर) | लागू ड्रायव्हर |
| 110HCE12N-B39 | 1.2° | ४.२ | १.२ | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1.2° | ४.२ | १.८८ | 18 | 20 | 221 | 1000 | 3HSS2260 |
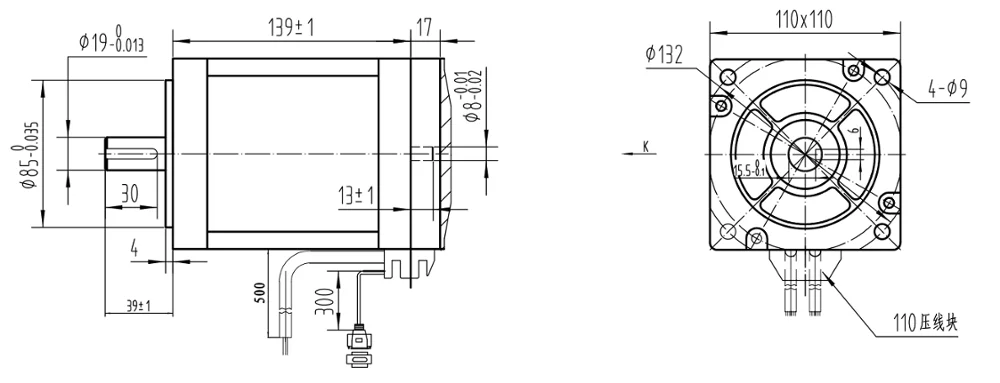
मोटर आकारमान: मिमी
टॉर्क/फ्रिक्वेंसी वक्र
ड्रायव्हर 3HSS2260
वैशिष्ट्ये
1, 32-बिट डीएसपी आणि वेक्टर बंद-लूप नियंत्रण तंत्रज्ञान
2, पायरी न गमावता, स्थितीत उच्च अचूकता
3, मोटर आउटपुट टॉर्क आणि कामाचा वेग सुधारा
4, परिवर्तनीय वर्तमान नियंत्रण तंत्रज्ञान, मोटर तापमान वाढ प्रतिबंधित
5, विविध प्रकारच्या यांत्रिक भार परिस्थितीशी जुळवून घेणे (कमी-कडकपणाच्या पुलीसह), नाही
लाभ पॅरामीटर समायोजित करणे आवश्यक आहे
6, गुळगुळीत आणि विश्वासार्ह हालचाल, कमी कंपन, प्रवेग आणि मध्ये उत्तम सुधारणा
कमी करणे
7, कंपनाशिवाय शून्य गती स्थिर करण्याची क्षमता
8, 3-फेज 86(NEMA34) आणि 110(NEMA 42) हायब्रिड सर्वो मोटरशी जुळवून घ्या
9, कमाल स्टेप-पल्स वारंवारता 200KHZ
10, मायक्रो स्टेप 400-60000 पल्स/रेव्ह
11, व्होल्टेज श्रेणी AC150-240V
12, ओव्हर करंट, ओव्हर व्होल्टेज आणि ओव्हर पोझिशन प्रोटेक्शन
13, सहा डिजिटल ट्यूब डिस्प्ले, पॅरामीटर्स सेट करणे सोपे आणि चालणाऱ्या मोटरचे निरीक्षण करणे
राज्य
मायक्रोस्टेप निवड:
| कोड | व्याख्या | श्रेणी | डीफॉल्ट मूल्य | शेरा |
| PA0 | आवृत्ती क्रमांक | ५०१ | बदल करण्यास मनाई आहे | |
| PA1 | नियंत्रण मोड निवड | 0~2 | 0 | |
| PA2 | मोटर प्रकार निवड | 0~2 | 0 | |
| PA3 | पॉवर ऑन डिस्प्ले | 0~7 | 0 | |
| PA4 | वर्तमान लूप Kp | 0~1000 | 200 | बदल करण्यास मनाई आहे |
| PA5 | वर्तमान वळण की | 0~1000 | 300 | बदल करण्यास मनाई आहे |
| PA6 | पोझिशन लूप Kp | 0~1000 | 300 | |
| PA7 | मायक्रो स्टेप्स सेटिंग | 400~60000 | 4000 | |
| PA8 | एन्कोडर रिझोल्यूशन(1000) | 4000 | बदल करण्यास मनाई आहे | |
| PA9 | एन्कोडर रिझोल्यूशन(1000) | 40~30000 | 1000 | |
| PA10 | वर्तमान धारण | 10~100 | 40 | |
| PA11 | बंद लूप करंट | 10~100 | 100 | |
| PA12 | आरक्षण | |||
| PA13 | आरक्षण | |||
| PA14 | स्तर सक्षम करा | 0/1 | 0 | |
| PA15 | अलार्म पातळी | 0/1 | 0 | |
| PA16 | पल्स मोड निवड | 0/1 | 0 | |
| PA17 | पल्स एज | 0/1 | 0 | |
| PA18 | मोटर रोटेशन दिशा | 0/1 | 0 | |
| PA19 | JOG गती | १~२०० | 60 | |
| PA20 | पेंड मोड विभाग | 0/1 | 0 | |
| PA21 | प्रलंबित स्तर | 0/1 | 0 |
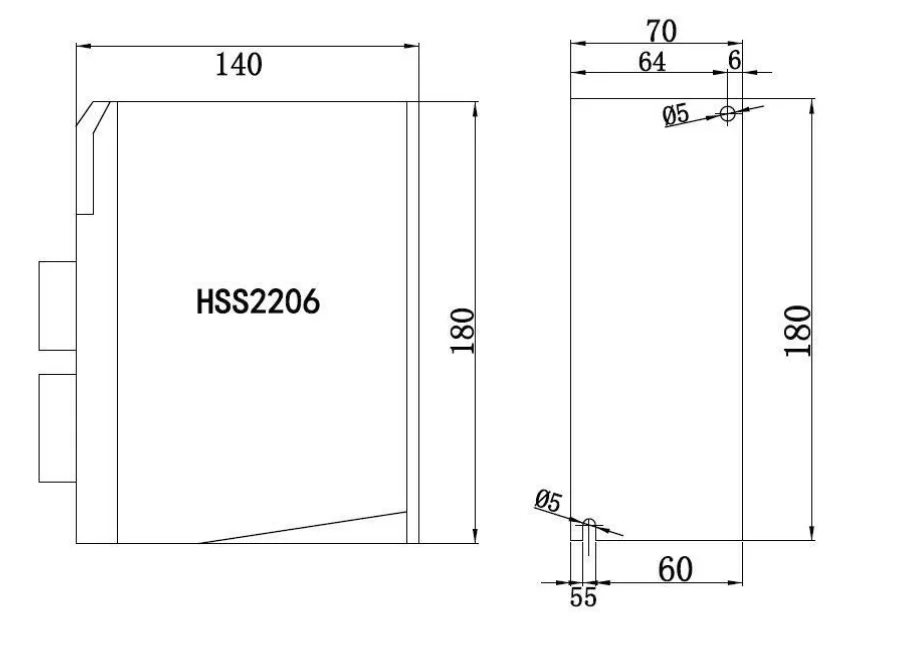
चालक परिमाण (मिमी):
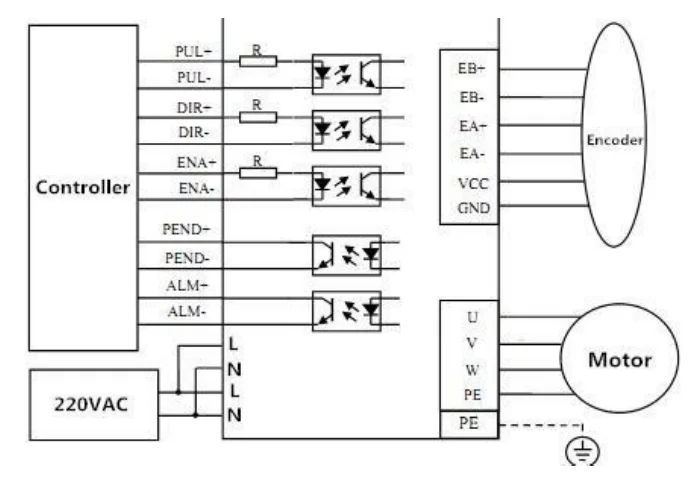
वायरिंग आकृती:



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
